Tutorials
Submarine Dive Technology
There are two ways to submerge a boat: dynamic diving and static diving.Many model submarines use the dynamic method while static diving is used by all military submarines.
Dynamic diving boats dive very similar to the way airplanes fly.
Static diving submarines dive by changing the buoyancy of the boat itself by letting water into ballast tanks. Once underwater, the depth of the boat is controlled with the hydroplanes.
Dynamic Diving Bots
The fully dynamic diving boats are the most simple model submarines available.?These boats have an inherent positive buoyancy which means that they will float back to the surface if control is lost. This is a major advantage for model submarines. This requires a combination of sufficient speed or sufficiently large hydroplanes.
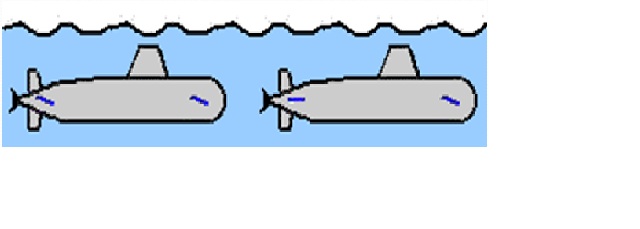
Angle of the dive planes, left low speed, right high speed.
Generally, for fully dynamic diving models one would want the boat rigged close to neutral buoyancy.In that case, the boat can be submerged at low speeds with a realistic size of the dive planes.
Static Diving Mechanism
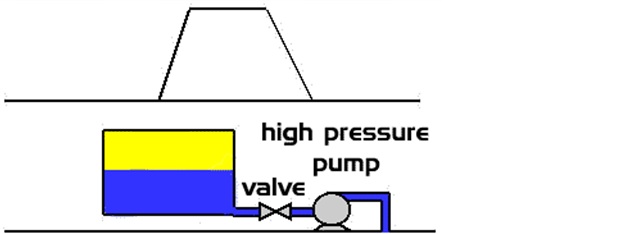
The pressure ballast tank consists of a sealed ballast tank capable of withstanding a significant pressure increase (5 bar or so). To flood the tank water is pumped into the tank with a high pressure water pump. Because the air in the ballast tank cannot escape the air is compressed.
To empty the tank, the water pump pumps the water out of the tanks again. Note that because the pressure build-up inside the ballast tank it can never be completely filled. Assuming a maximum pressure of 5 bar inside the tank, about 80 percent of the volume of the ballast tank can be used.
Piston Ballast Tank
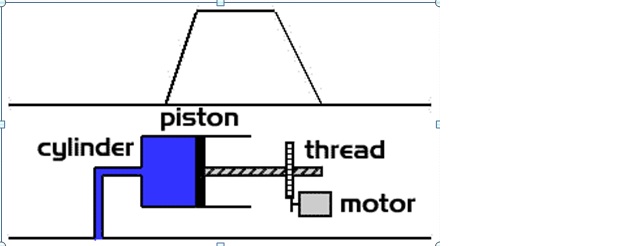
The piston ballast tank consists of a cylinder and a movable piston, just like a giant syringe.
The piston can be moved with a thread, a cogwheel and a small motor. The outer end of the cylinder is directly connected to the surrounding water.Due to the large stroke of the piston, these types of ballast tanks are mostly fitted horizontally. This means that during filling of the tank with water the axial center of gravity of the boat is affected.
This drawback can be overcome by using two piston tanks in the aft and bow section of the boat.
Water Proofing Methods
Waterproof Coating the Servo
- Servos are miniature DC motors. They are used for robotic joints because they can rotate precisely and are easy to control. However, they are not waterproof without modification.
- Simple servo waterproof coatings methods include inserting it into a balloon or dipping it in a plastic coating compound. These methods can work well for short immersions in a low-pressure underwater environment. However, both leave the servo shaft vulnerable to water intrusion.

Complete guide to waterproofing your Servo can be found here:
http://www.societyofrobots.com/actuators_waterproof_servo.shtml
Watertight Sealing the Servo
- Sealing the servo is a more reliable method of waterproofing. While cyanoacrylate glues will work, nonconductive waterproof epoxy is easier to use and gives a better result. As a final precaution, filling the inside of the servo with a non-conductive oil, such as mineral oil, will further protect the mechanism from water.
Watertight Case
- A final method is to seal the robot mechanism, batteries and circuits in a watertight case. This method is good for building an underwater vehicle. The case can be built from scratch or start with a manufactured watertight box. Sport boxes for fishing and diving come in a variety of shapes, sizes and depth ratings. Transparent boxes allow for inspection without opening the box once it is sealed.
- Wheels or propellers are affixed to the box with non-corrosive brass screws, and all holes are filled and sealed with marine-grade epoxy paste. Wires that penetrate the case are sealed inside and out with silicone.
Online References
You can follow this Noob-to-pro tutorial for building your own underwater ROV:
You can also see this tutorial for building your underwater robot: