Introduction
During the search for the 882nd piece of the stolen treasure, the medallion, Barbossa decides to go to Isla de Muerta. When hope seems lost, he consults Tia Dalma, the fortune teller who gives them this prophecy:
“What you search for is not a piece of cake
To gain which, follow my words; make no mistake
Again and again, you will face a glow so green
When this is seen, to the left you should lean
Along with this, you’ll find a bright red light
Approaching this sight, you will turn to the right”
“In your journey, many an obstacle you will face
The dangers of this place, you must embrace with grace
Upon reaching your goal, do not feel secure
To acquire your treasure, you must endure
On three pillars, three lights you will find
Do not be colourblind; flash them back the way they were lined”
Hearing this, Barbossa is determined and sets sail to find the final piece of the stolen treasure.
Problem Statement
To build an autonomous robot capable of traversing through the arena through the given path generated by detecting different colours at intersections to reach the endpoint.
USP
- Line Following Mechanism
- Colour Recognition
- Memory and backtracking
General Description and Event Setup
-
The arena will be a 5x5 grid with white lines on a black background.
-
Some of the edges in the grid have obstacles placed. They can be a zig-zag path, bumps, etc. They will have white lines over them, similar to the grid.
-
There will be colour patches on the left as well as right side of certain points/intersections, that have to be detected by the bot.
-
Round 1: The bot has to traverse through a fixed given path while recognising the colours correctly and clearing the obstacles.
-
Round 2: The bot has to traverse through the correct path in the grid by following the specific instructions with respect to each colour and also perform a colour task at the end.
-
Bonus Round: The bot is required to retrace the path it followed till the 2nd endpoint from the start point.
Arena
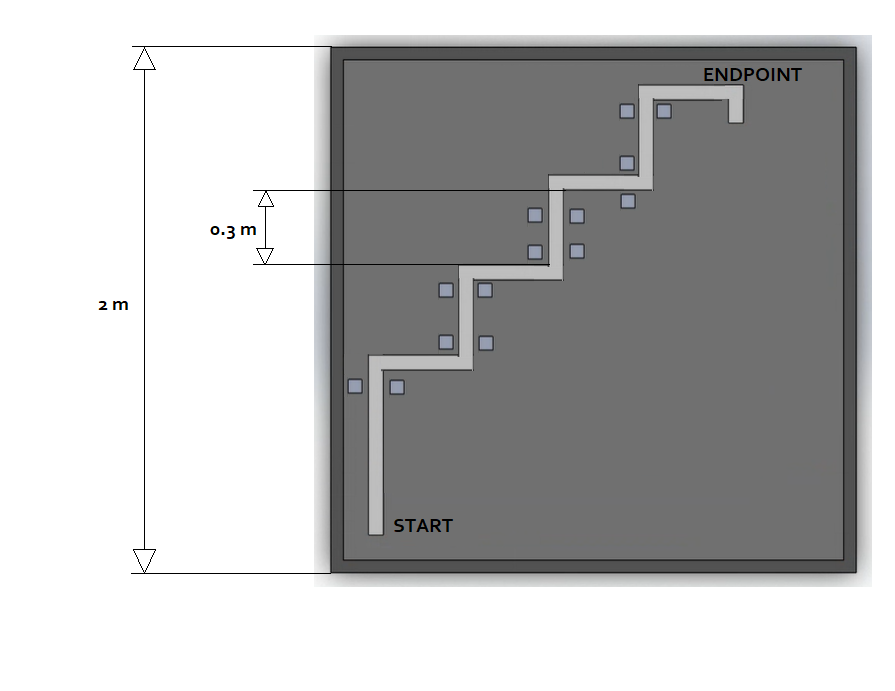
Arena diagram for Round 1
Arena diagram for Round 2
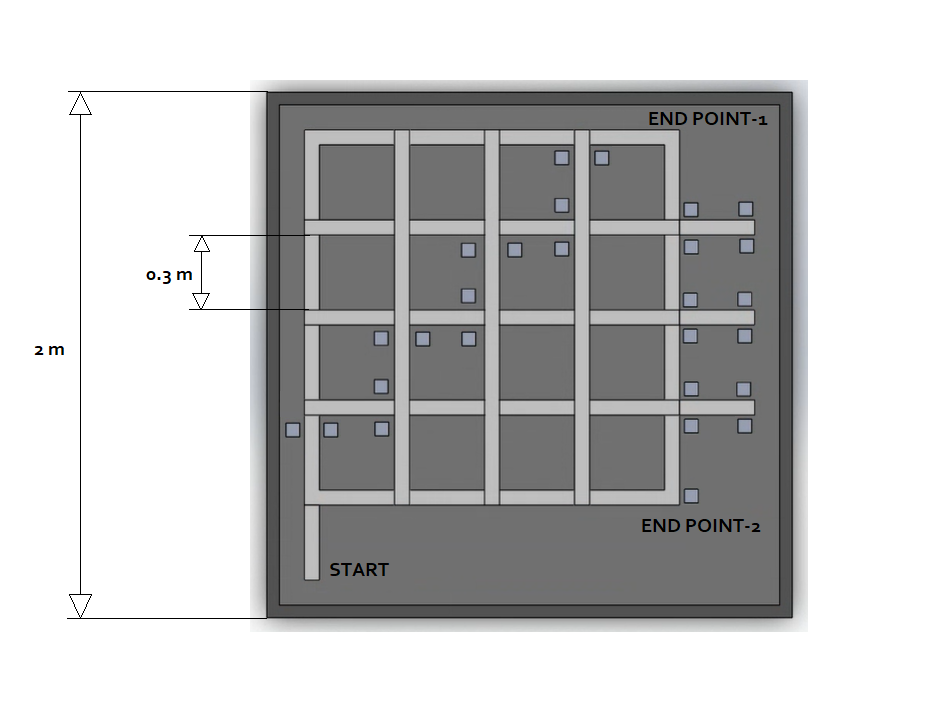
Arena specifications
- The distance between each node will be 30 centimetres.
- The dimensions of each intersection will be 2.5 by 2.5 centimetres.
- The line width is 2.5 centimetres.
- The outer dimensions of the arena will be 200 x 200 cm.
- The arenas shown in the diagram above are just for reference. Actual arenas might differ from the example arenas. Hard coding, according to the arena, is not allowed.
- The dimensions are to be considered with a maximum tolerance of 10%.
Colour patch/intersection diagram
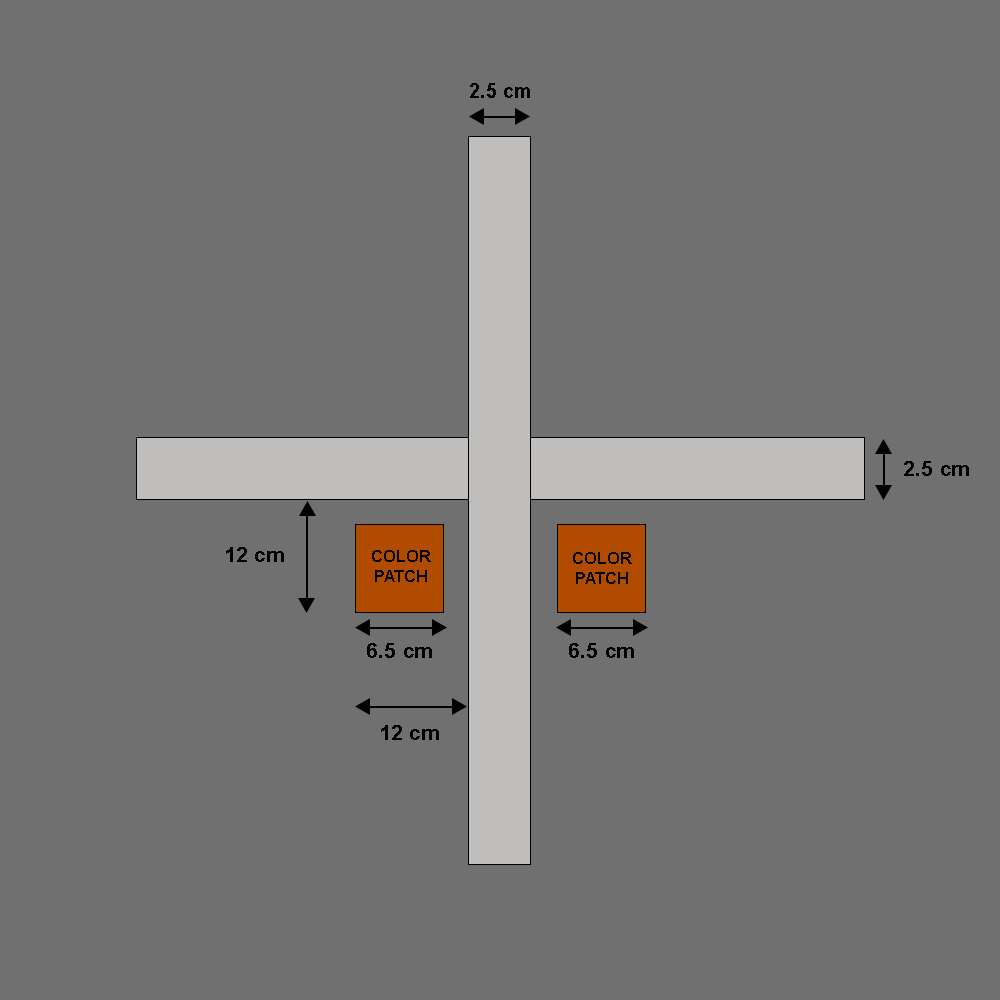
Colour patch/intersection specifications
-
The dimensions are to be considered with a maximum tolerance of 10%.
-
For Round 1, colour patches of the arena will be revealed just before the event.
-
For Round 2, participants will be given the colour codes for the intersections well before the event. For the final objective, colour patches will be revealed just before the event.
-
All other dimensions are mentioned in the diagram above.
Robot Specification
-
The robot must be wired/wireless and fully autonomous without any manually controlled parts.
-
The robot must fit in a cube of 20 cm, with a tolerance of 10% in its dimensions.
-
No part/mechanism of/on the bot should exceed the given dimensions before the commencement of the event.
Event Rules
-
The bot has to traverse the arena using the line-following mechanism.
-
It has to name the colours correctly it identifies along the path and display it on an LCD or an RGB 3 colour LED Module.
-
It can either show the colour name or the rgb/hex code in any format on the LCD display, or it can just flash the colour on the LED.
-
The bot shall not jump or fly over the arena or cause any damage to it. Doing so will lead to the disqualification of the team.
-
All teams will get a run in Round 1. The qualified teams for Round 2 will be decided by Team ROBOTIX. Completing the task is not the only criterion for qualifying.
Timeouts and Re-runs
-
A maximum of 4 reruns can be taken. A penalty will be awarded for each rerun, and the bot will start from the beginning of the arena. Participants are allowed to make as many changes to the hardware or software as they want.
-
In case the bot fails to cross an obstacle, the team can take as many chances as they want to cross it. Keep in mind the time for each round per team is fixed.
-
They can also ask for the obstacle to be removed. In this case, the clock will be paused, and the obstacle will be removed. They will not be awarded points associated with the obstacle.
-
The teams can take a maximum of 3 timeouts in case of a genuine technical fault in the robot. The bot will continue from the same point in that case without making any changes to the hardware or software.
-
The no. of timeouts is independent of rerun, i.e., there will only be a total of 3 timeouts and a total of 4 reruns. It is not 3 timeouts per run.
-
Team ROBOTIX can refuse a timeout if the reason does not sound genuine enough, and their decision will be binding and final. Furthermore, this timeout cannot exceed more than 3 minutes.
Round 1
Task
-
The arena in Round 1 will be fixed. Each team will traverse over the same arena.
-
The arena will have multiple coloured patches on the left and right side of the line follower path.
-
The robot is required to identify the colour on any one side of the path since the colour patches are symmetrically placed to the left as well as right.
-
Identifying the colour patches correctly will have points associated with them.
-
While traversing, every time the bot passes through a coloured patch, it has to showcase the colour of the patch through an onboard RGB LED/ LCD Display. LCD Display is preferred.
-
The bot has to successfully clear the obstacles (if any) on its path.
-
The time limit for Round 1 is 5 minutes (exclusive of timeouts). A penalty will be awarded for every minute exceeding the time limit.
Round 2
Task
-
The robot will start at the Start point and go till the 1st endpoint while recognising colour patches at the junctions and making turns accordingly.
-
Colour codes will be released about which colour corresponds to what turn, as in whether the robot has to make a left or a right turn. In the absence of patches, the bot has to keep moving straight.
-
The bot also has to display the colour on the RGB LED/LCD Display.
-
The bot has to successfully clear the obstacles (if any) on its path.
-
After it has reached the first end-point, it should keep moving on the path in order to complete the objective and reach the 2nd endpoint.
-
The bot has to turn left at the first extension line in the middle of 2 grid lines and record the colour patch. These extension lines will also have colour patches associated with them, which will be released later.
-
Reverse back to the main grid, and follow the same procedure for the other 2 extension lines.
-
Following the line, it should reach the second endpoint, where it has to display all the colours in the exact same order for 5 seconds each through an onboard RGB LED/ LCD Display. LCD Display is preferred.
-
The second endpoint will also have a colour patch associated with it.
-
The time limit for Round 2 is 10 minutes (exclusive of timeouts). A penalty will be awarded for every minute exceeding the time limit.
Bonus Round
Task
-
Upon completing the task of Round 2, the robot can perform a bonus task.
-
The task will be to backtrack the entire path without making use of the colour patches. They will be removed from the arena.
-
The obstacles will also not be present on the arena.
-
The time limit for Bonus Round is 10 minutes (exclusive of Round 2).
-
No timeouts/reruns will be allowed in this round. The moment at which the robot strays from its path, the round will end, and the score will be calculated.
Scoring Formula
Round 1
-
Positives
- Base score: 300
- Line Following: 200
- Correctly detected colour: 50
-
Obstacle cleared: 100
-
Negatives
- For each rerun: 75
- For each timeout: 50
- Time elapsed after time limit in seconds: 2
Round 2
-
Positives
- Base score: 300
- Every correctly executed turn at junctions: 25
- Obstacle cleared: 50
- Correctly reached 1st endpoint: 100
- Objective of recording colours completed and reached 2nd endpoint: 150
-
Correct order of colours shown at 2nd endpoint: 200
-
Negatives
- For each rerun: 75
- For each timeout: 50
- Time elapsed after time limit in seconds: 2
Bonus Round
-
Positives
-
Length of path correctly traced before the robot strays: 1
Note
In case of a tie, below is the preference order for a tiebreaker:
- The number of obstacles cleared.
- The number of colours recognised correctly.
- The time taken for the entire run-through.
General Rules
-
Maximum number of participants allowed per team: 6 people.
-
Every participant must be a part of only one team.
-
The participants will be provided with 220 Volts, 50 Hz standard AC supply.
-
Only 16-bit microcontrollers or below will be allowed.
-
Participants will have to arrange any other power supply required for their robot.
-
Teams cannot tinker with their robots during the run.
-
LEGO kits or their spare parts are not allowed.
-
Sportsmanship is expected from the participants.
-
Damage to the arena in any form will lead to disqualification.
-
The organisers reserve the right to change the rules as they deem fit. Changes, if any, will be notified to the participants.
-
It is suggested to the participants to try making a wireless robot, powered by a battery on-board.
Links to Tutorials:
For relevant tutorials check TUTORIALS.
Contact
Ayush Deep
Head, Technology Robotix Society
Email: ayushdeep2001@gmail.com
Ph. no: +91 6205861948
Diya Chodnekar
Head, Technology Robotix Society
Email: diya.chodnekar@gmail.com
Ph. no: +91 9049998689